1. දෘශ්ය පද්ධතිවල නාභීය දිග
නාභීය දුර යනු දෘශ්ය පද්ධතියේ ඉතා වැදගත් දර්ශකයකි, නාභීය දුර පිළිබඳ සංකල්පය සඳහා, අපට අඩු වැඩි වශයෙන් අවබෝධයක් ඇති බව අපි මෙහි සමාලෝචනය කරමු.
දෘශ්ය පද්ධතියක නාභීය දුර, සමාන්තර ආලෝක සිදුවීමකදී දෘශ්ය පද්ධතියේ දෘශ්ය මධ්යස්ථානයේ සිට කදම්භයේ නාභිගත වීමට ඇති දුර ලෙස අර්ථ දක්වා ඇති අතර එය දෘශ්ය පද්ධතියක ආලෝකයේ සාන්ද්රණය හෝ අපසරනය මැනීමේ මිනුමක් වේ. මෙම සංකල්පය නිදර්ශනය කිරීම සඳහා අපි පහත රූප සටහන භාවිතා කරමු.

ඉහත රූපයේ, වම් කෙළවරේ සිට සමාන්තර කදම්භ සිදුවීම, දෘශ්ය පද්ධතිය හරහා ගමන් කිරීමෙන් පසු, රූප නාභිගත F' වෙත අභිසාරී වේ, අභිසාරී කිරණයේ ප්රතිලෝම දිගු රේඛාව ලක්ෂ්යයක දී සිදුවීම් සමාන්තර කිරණයේ අනුරූප දිගු රේඛාව සමඟ ඡේදනය වන අතර, මෙම ලක්ෂ්යය පසුකර දෘශ්ය අක්ෂයට ලම්බකව ඇති මතුපිට පසුපස ප්රධාන තලය ලෙස හැඳින්වේ, පසුපස ප්රධාන තලය P2 ලක්ෂ්යයේ දී දෘශ්ය අක්ෂය සමඟ ඡේදනය වේ, එය ප්රධාන ලක්ෂ්යය (හෝ දෘශ්ය මධ්ය ලක්ෂ්යය) ලෙස හැඳින්වේ, ප්රධාන ලක්ෂ්යය සහ රූප නාභිගත කිරීම අතර දුර, එය අප සාමාන්යයෙන් නාභිගත දුර ලෙස හඳුන්වන දෙයයි, සම්පූර්ණ නම රූපයේ ඵලදායී නාභීය දුර වේ.
රූපයෙන් දෘශ්ය පද්ධතියේ අවසාන පෘෂ්ඨයේ සිට රූපයේ නාභි ලක්ෂ්යය F' දක්වා ඇති දුර පසුපස නාභීය දුර (BFL) ලෙස හැඳින්වෙන බව ද දැකගත හැකිය. ඒ අනුව, සමාන්තර කදම්භය දකුණු පැත්තේ සිට සිදුවුවහොත්, ඵලදායී නාභීය දුර සහ ඉදිරිපස නාභීය දුර (FFL) පිළිබඳ සංකල්ප ද ඇත.
2. නාභීය දුර පරීක්ෂණ ක්රම
ප්රායෝගිකව, දෘශ්ය පද්ධතිවල නාභීය දුර පරීක්ෂා කිරීම සඳහා භාවිතා කළ හැකි ක්රම රාශියක් ඇත. විවිධ මූලධර්ම මත පදනම්ව, නාභීය දුර පරීක්ෂණ ක්රම කාණ්ඩ තුනකට බෙදිය හැකිය. පළමු කාණ්ඩය රූප තලයේ පිහිටීම මත පදනම් වන අතර, දෙවන කාණ්ඩය නාභීය දුර අගය ලබා ගැනීම සඳහා විශාලනය සහ නාභීය දුර අතර සම්බන්ධතාවය භාවිතා කරන අතර, තුන්වන කාණ්ඩය නාභීය දුර අගය ලබා ගැනීම සඳහා අභිසාරී ආලෝක කදම්භයේ තරංග ඉදිරිපස වක්රය භාවිතා කරයි.
මෙම කොටසේදී, දෘශ්ය පද්ධතිවල නාභීය දුර පරීක්ෂා කිරීම සඳහා බහුලව භාවිතා වන ක්රම අපි හඳුන්වා දෙන්නෙමු::
2.1 ශ්රේණියCඔලිමේටර් ක්රමය
දෘශ්ය පද්ධතියක නාභීය දුර පරීක්ෂා කිරීම සඳහා කොලිමේටරයක් භාවිතා කිරීමේ මූලධර්මය පහත රූප සටහනේ දක්වා ඇත:
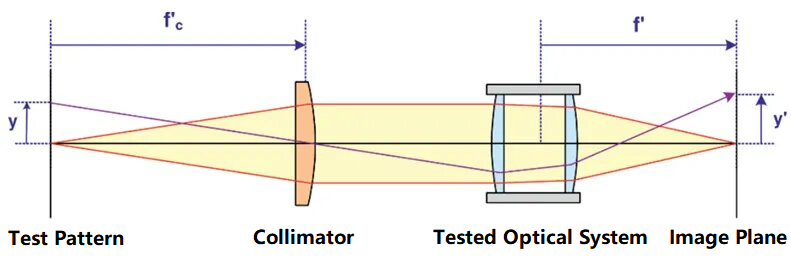
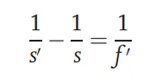
රූපයේ, පරීක්ෂණ රටාව කොලිමේටරයේ නාභියේ තබා ඇත. පරීක්ෂණ රටාවේ උස y සහ නාභීය දුර fcකොලිමේටරයේ 'දන්නා' ලෙස හැඳින්වේ. කොලිමේටරය මඟින් විමෝචනය කරන සමාන්තර කදම්භය පරීක්ෂා කරන ලද දෘශ්ය පද්ධතිය මගින් අභිසාරී කර රූප තලය මත රූපයට ඇතුළත් කළ පසු, රූප තලයේ පරීක්ෂණ රටාවේ උස y' මත පදනම්ව දෘශ්ය පද්ධතියේ නාභීය දුර ගණනය කළ හැකිය. පරීක්ෂා කරන ලද දෘශ්ය පද්ධතියේ නාභීය දුර පහත සූත්රය භාවිතා කළ හැකිය:

2.2 ගවුසියානුMආචාර ධර්ම
දෘශ්ය පද්ධතියක නාභීය දුර පරීක්ෂා කිරීම සඳහා ගවුසියානු ක්රමයේ ක්රමානුරූප රූපය පහත පරිදි දැක්වේ:
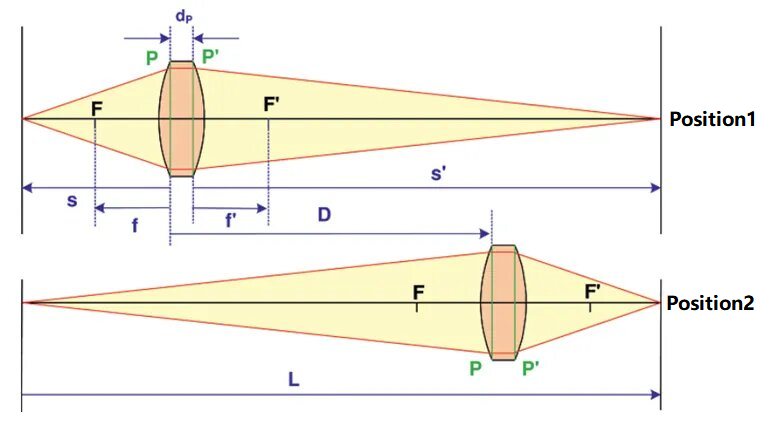
රූපයේ, පරීක්ෂාවට ලක්වන දෘශ්ය පද්ධතියේ ඉදිරිපස සහ පසුපස ප්රධාන තල පිළිවෙලින් P සහ P' ලෙස නිරූපණය කර ඇති අතර, ප්රධාන තල දෙක අතර දුර d වේ.Pමෙම ක්රමයේදී, d හි අගයPදන්නා ලෙස සැලකේ, නැතහොත් එහි අගය කුඩා වන අතර නොසලකා හැරිය හැක. වස්තුවක් සහ ග්රාහක තිරයක් වම් සහ දකුණු කෙළවරේ තබා ඇති අතර, ඒවා අතර දුර L ලෙස සටහන් වේ, එහිදී L පරීක්ෂාවට ලක්වන පද්ධතියේ නාභීය දුර මෙන් 4 ගුණයකට වඩා වැඩි විය යුතුය. පරීක්ෂාවට ලක්වන පද්ධතිය ස්ථාන දෙකක තැබිය හැකි අතර, පිළිවෙලින් ස්ථානය 1 සහ ස්ථානය 2 ලෙස දැක්වේ. වම් පස ඇති වස්තුව ග්රාහක තිරයේ පැහැදිලිව නිරූපණය කළ හැකිය. මෙම ස්ථාන දෙක අතර දුර (D ලෙස දැක්වේ) මැනිය හැකිය. සංයුක්ත සම්බන්ධතාවයට අනුව, අපට ලබා ගත හැක්කේ:
මෙම ස්ථාන දෙකේදී, වස්තු දුර පිළිවෙලින් s1 සහ s2 ලෙස සටහන් වන අතර, පසුව s2 - s1 = D වේ. සූත්ර ව්යුත්පන්නය හරහා, අපට දෘශ්ය පද්ධතියේ නාභීය දුර පහත පරිදි ලබා ගත හැකිය:

2.3 ශ්රේණියතඑන්සෝමීටරය
දිගු නාභීය දුර දෘශ්ය පද්ධති පරීක්ෂා කිරීම සඳහා ලෙන්සෝමීටරය ඉතා සුදුසු ය. එහි ක්රමානුරූප රූපය පහත පරිදි වේ:
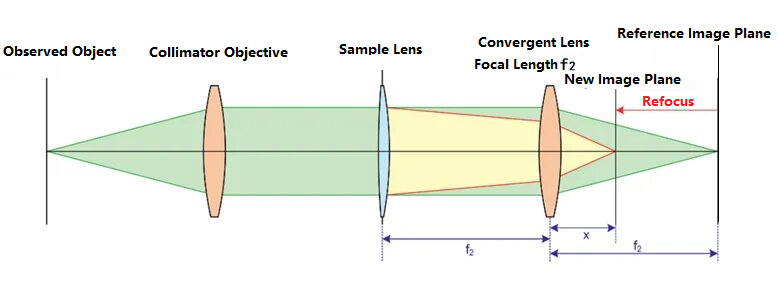
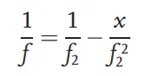
පළමුව, පරීක්ෂාවට ලක්වන කාචය දෘශ්ය මාර්ගයේ තබා නොමැත. වම් පසින් නිරීක්ෂණය කරන ලද ඉලක්කය ගැටෙන කාචය හරහා ගමන් කර සමාන්තර ආලෝකය බවට පත්වේ. සමාන්තර ආලෝකය f නාභීය දුරක් සහිත අභිසාරී කාචයක් මගින් අභිසාරී වේ.2සහ යොමු රූප තලයේදී පැහැදිලි රූපයක් සාදයි. දෘශ්ය මාර්ගය ක්රමාංකනය කිරීමෙන් පසු, පරීක්ෂාවට ලක් වූ කාචය දෘශ්ය මාර්ගයේ තබන අතර, පරීක්ෂාවට ලක් වූ කාචය සහ අභිසාරී කාචය අතර දුර f වේ.2. එහි ප්රතිඵලයක් ලෙස, පරීක්ෂාවට ලක්වන කාචයේ ක්රියාකාරිත්වය හේතුවෙන්, ආලෝක කදම්භය නැවත නාභිගත වන අතර, එමඟින් රූප තලයේ පිහිටීමෙහි මාරුවක් ඇති වන අතර, එමඟින් රූප සටහනේ නව රූප තලයේ ස්ථානයේ පැහැදිලි රූපයක් ලැබේ. නව රූප තලය සහ අභිසාරී කාචය අතර දුර x ලෙස දැක්වේ. වස්තු-රූප සම්බන්ධතාවය මත පදනම්ව, පරීක්ෂාවට ලක්වන කාචයේ නාභීය දුර පහත පරිදි අනුමාන කළ හැකිය:
ප්රායෝගිකව, ඇස් කණ්ණාඩි කාචවල ඉහළ නාභිගත මිනුම් සඳහා කාච මාපකය බහුලව භාවිතා වන අතර සරල ක්රියාකාරිත්වය සහ විශ්වාසදායක නිරවද්යතාවයේ වාසි ඇත.
2.4 ඇබේRවර්තනමානය
දෘශ්ය පද්ධතිවල නාභීය දුර පරීක්ෂා කිරීම සඳහා ඇබේ වර්තනමානය තවත් ක්රමයකි. එහි ක්රමානුරූප රූපය පහත පරිදි වේ:
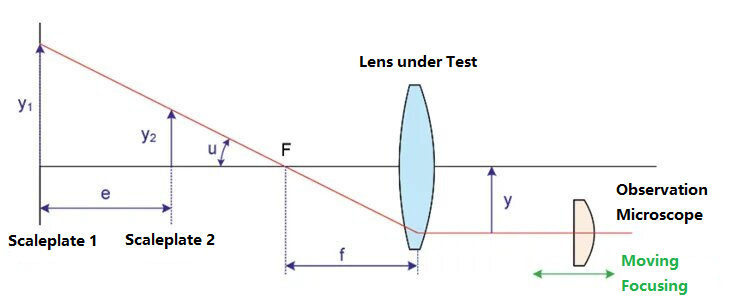
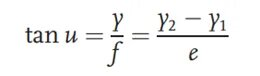
පරීක්ෂාවට ලක්වන කාචයේ වස්තු මතුපිට පැත්තේ විවිධ උසකින් යුත් පාලක දෙකක් තබන්න, එනම් පරිමාණ තහඩුව 1 සහ පරිමාණ තහඩුව 2. අනුරූප පරිමාණ තහඩු වල උස y1 සහ y2 වේ. පරිමාණ තහඩු දෙක අතර දුර e වන අතර, පාලකයේ ඉහළ රේඛාව සහ දෘශ්ය අක්ෂය අතර කෝණය u වේ. පරිමාණය f නාභීය දුරක් සහිත පරීක්ෂා කරන ලද කාචය මඟින් රූපයට නංවනු ලැබේ. රූපයේ මතුපිට කෙළවරේ අන්වීක්ෂයක් ස්ථාපනය කර ඇත. අන්වීක්ෂයේ පිහිටීම චලනය කිරීමෙන්, පරිමාණ තහඩු දෙකෙහි ඉහළ රූප සොයාගත හැකිය. මෙම අවස්ථාවේදී, අන්වීක්ෂය සහ දෘශ්ය අක්ෂය අතර දුර y ලෙස දැක්වේ. වස්තු-රූප සම්බන්ධතාවයට අනුව, අපට නාභීය දුර ලබා ගත හැකිය:
2.5 මොයර් පරාවර්තකමිතියක්රමය
මොයිරේ ඩිෆ්ලෙක්ටොමිතික ක්රමයේදී සමාන්තර ආලෝක කදම්භවල රොන්චි රීති කට්ටල දෙකක් භාවිතා කරනු ඇත. රොන්චි රීතිය යනු වීදුරු උපස්ථරයක් මත තැන්පත් කර ඇති ලෝහ ක්රෝමියම් පටලයක ජාලක වැනි රටාවකි, එය දෘශ්ය පද්ධතිවල ක්රියාකාරිත්වය පරීක්ෂා කිරීම සඳහා බහුලව භාවිතා වේ. දෘශ්ය පද්ධතියේ නාභීය දුර පරීක්ෂා කිරීම සඳහා දැලක දෙකෙන් සාදන ලද මොයිරේ දාරවල වෙනස මෙම ක්රමය භාවිතා කරයි. මූලධර්මයේ ක්රමානුරූප සටහන පහත පරිදි වේ:
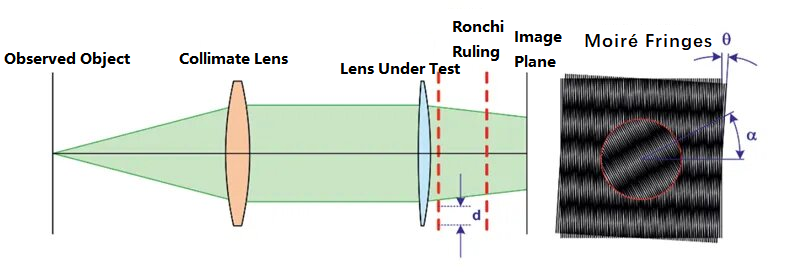
ඉහත රූපයේ දැක්වෙන පරිදි, නිරීක්ෂණය කරන ලද වස්තුව, කොලිමේටරය හරහා ගමන් කිරීමෙන් පසු, සමාන්තර කදම්භයක් බවට පත්වේ. දෘශ්ය මාර්ගයේ, පළමුව පරීක්ෂා කරන ලද කාචය එකතු නොකර, සමාන්තර කදම්භය θ හි විස්ථාපන කෝණයක් සහ d හි දැලක පරතරයක් සහිත දැලක දෙකක් හරහා ගමන් කර, රූප තලය මත මොයිරේ දාර කට්ටලයක් සාදයි. ඉන්පසු, පරීක්ෂා කරන ලද කාචය දෘශ්ය මාර්ගයේ තබා ඇත. කාචයෙන් වර්තනය වීමෙන් පසු මුල් කොලිමේටඩ් ආලෝකය යම් නාභීය දුරක් නිපදවනු ඇත. ආලෝක කදම්භයේ වක්ර අරය පහත සූත්රයෙන් ලබා ගත හැකිය:
සාමාන්යයෙන් පරීක්ෂාවට ලක්වන කාචය පළමු දැලකයට ඉතා ආසන්නව තබා ඇති බැවින් ඉහත සූත්රයේ R අගය කාචයේ නාභීය දුරට අනුරූප වේ. මෙම ක්රමයේ වාසිය නම් ධන සහ සෘණ නාභීය දුර පද්ධතිවල නාභීය දුර පරීක්ෂා කළ හැකි වීමයි.
2.6 දෘශ්යFඅයිබර්Aයුටෝකොලිමේෂන්Mආචාර ධර්ම
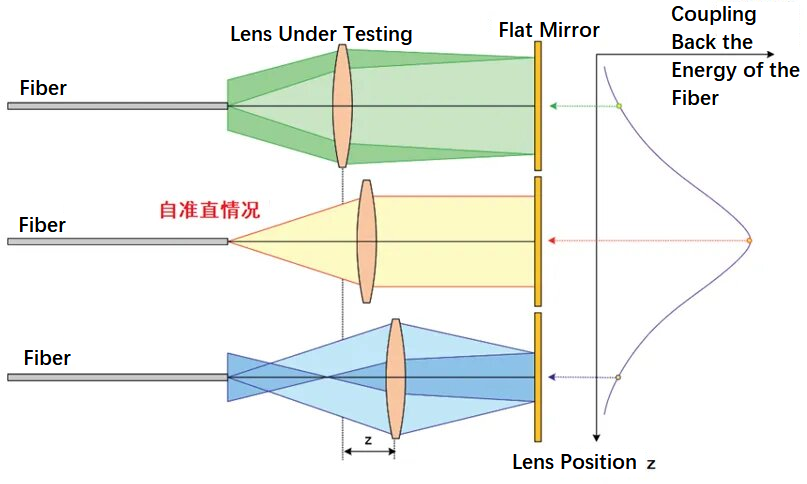
කාචයේ නාභීය දුර පරීක්ෂා කිරීම සඳහා දෘශ්ය තන්තු ස්වයංක්රීය සංයෝජන ක්රමය භාවිතා කිරීමේ මූලධර්මය පහත රූපයේ දැක්වේ. එය පරීක්ෂා කරනු ලබන කාචය හරහා ගොස් පසුව තල දර්පණයක් මතට ගමන් කරන අපසාරී කදම්භයක් විමෝචනය කිරීමට තන්තු දෘෂ්ටි විද්යාව භාවිතා කරයි. රූපයේ ඇති දෘශ්ය මාර්ග තුන පිළිවෙලින් නාභිගත කිරීම තුළ, නාභිගත කිරීම තුළ සහ නාභිගත කිරීමෙන් පිටත දෘශ්ය තන්තු වල තත්වයන් නියෝජනය කරයි. පරීක්ෂණයට ලක්වන කාචයේ පිහිටීම ඉදිරියට සහ පසුපසට ගෙන යාමෙන්, ඔබට නාභිගත කිරීමේදී තන්තු හිසෙහි පිහිටීම සොයාගත හැකිය. මෙම අවස්ථාවේදී, කදම්භය ස්වයං-සංඝටනය වන අතර, තල දර්පණය මගින් පරාවර්තනය කිරීමෙන් පසු, බොහෝ ශක්තිය තන්තු හිසෙහි ස්ථානයට නැවත පැමිණේ. ක්රමය ප්රතිපත්තිමය වශයෙන් සරල වන අතර ක්රියාත්මක කිරීමට පහසුය.
3. නිගමනය
නාභීය දුර යනු දෘශ්ය පද්ධතියක වැදගත් පරාමිතියකි. මෙම ලිපියෙන් අපි දෘශ්ය පද්ධති නාභීය දුර පිළිබඳ සංකල්පය සහ එහි පරීක්ෂණ ක්රම විස්තර කරමු. ක්රමානුරූප සටහන සමඟ ඒකාබද්ධව, රූප-පැත්තේ නාභීය දුර, වස්තු-පැත්තේ නාභීය දුර සහ ඉදිරිපස සිට පසුපසට නාභීය දුර යන සංකල්ප ඇතුළුව නාභීය දුරෙහි අර්ථ දැක්වීම අපි පැහැදිලි කරමු. ප්රායෝගිකව, දෘශ්ය පද්ධතියක නාභීය දුර පරීක්ෂා කිරීම සඳහා බොහෝ ක්රම තිබේ. මෙම ලිපිය කොලිමේටර් ක්රමය, ගවුසියානු ක්රමය, නාභීය දුර මිනුම් ක්රමය, ඇබේ නාභීය දුර මිනුම් ක්රමය, මොයිරේ අපගමන ක්රමය සහ දෘශ්ය තන්තු ස්වයංක්රීය ගැටීමේ ක්රමය පිළිබඳ පරීක්ෂණ මූලධර්ම හඳුන්වා දෙයි. මෙම ලිපිය කියවීමෙන්, දෘශ්ය පද්ධතිවල නාභීය දුර පරාමිතීන් පිළිබඳ වඩා හොඳ අවබෝධයක් ඔබට ලැබෙනු ඇතැයි මම විශ්වාස කරමි.
පළ කිරීමේ කාලය: අගෝස්තු-09-2024


